

En general, se cree que si la configuración del dispositivo de accionamiento de la cinta transportadora es demasiado alta, es un desperdicio de recursos. Sin embargo, para equipos grandes, si es demasiado bajo, la tensión dinámica aumentará cuando se arranca la correa e incluso hará que la correa resuene. Cómo seleccionar razonablemente el dispositivo impulsor es la clave en el diseño de la cinta transportadora. También es una cuestión clave si el diseño es razonable, la operación es normal y el costo y el volumen de mantenimiento son bajos. Este artículo analiza las aplicaciones, ventajas y desventajas de varios métodos de conducción comunes como referencia.

1. Rodillo eléctrico
Los tambores eléctricos se dividen en tambores eléctricos incorporados y tambores eléctricos externos. La principal diferencia entre ellos es que el motor del tambor eléctrico incorporado está instalado dentro del tambor, mientras que el motor del tambor eléctrico externo está instalado fuera del tambor y está conectado rígidamente al tambor.
El tambor eléctrico incorporado tiene una mala disipación de calor porque el motor está instalado dentro del tambor. Generalmente se utiliza en cintas transportadoras con una potencia inferior a 30 kw y una longitud inferior a 150 m. Debido a que el motor está instalado fuera del tambor, el tambor eléctrico externo tiene una mejor disipación del calor. Generalmente se utiliza en cintas transportadoras con una potencia inferior a 45 kw y una longitud inferior a 150 m.
Ventajas: estructura compacta, bajos costos de mantenimiento, alta confiabilidad, el dispositivo de accionamiento y el rodillo de transmisión están integrados en uno.
Desventajas: Rendimiento deficiente del arranque suave, gran impacto en la red eléctrica cuando arranca el motor. La confiabilidad es peor que el método de motor tipo Y + acoplamiento + accionamiento reductor.
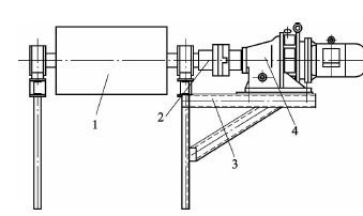
2. Modo de conducción deficiente del motor tipo Y + acoplamiento + reductor
Ventajas: estructura simple, pequeña carga de trabajo de mantenimiento, bajos costos de mantenimiento y alta confiabilidad.
Desventajas: Rendimiento deficiente del arranque suave, gran impacto en la red eléctrica cuando arranca el motor. Generalmente se utiliza en cintas transportadoras con una potencia inferior a 45 kw y una longitud inferior a 150 m.
3. Motor tipo Y + acoplamiento de fluido limitador de par + reductor
Es un dispositivo de accionamiento ampliamente utilizado en cintas transportadoras, que generalmente se utiliza en cintas transportadoras con una potencia única de menos de 630 kw y una longitud de menos de 1500 m.
El acoplamiento de fluido con limitación rectangular se divide en un acoplamiento de fluido con limitación rectangular con la cámara auxiliar trasera y un acoplamiento de fluido con limitación rectangular sin la cámara auxiliar trasera. Debido a que el primero ingresa lentamente a la cavidad de trabajo del acoplamiento hidráulico a través del orificio del acelerador a través de la cámara auxiliar trasera cuando se arranca el motor, su rendimiento de arranque es mejor que el del segundo.
Si se selecciona el que tiene la cámara auxiliar trasera, cuando los dos modelos de acoplamiento de fluido pueden cumplir con su potencia de transmisión, debido al largo tiempo de arranque y la gran generación de calor del acoplamiento de fluido, se debe preferir el tipo de acoplamiento de fluido más grande.
Si se selecciona el que no tiene cámara auxiliar trasera, cuando los dos modelos de acoplamiento hidráulico pueden cumplir con su potencia de transmisión, se debe preferir el tipo más pequeño de acoplamiento hidráulico porque el tiempo de arranque del acoplamiento hidráulico es corto y la generación de calor es pequeña.
Para cintas transportadoras impulsadas por múltiples motores, si se selecciona este método de transmisión, se recomienda elegir un acoplamiento hidráulico con acoplamiento hidráulico del tipo de limitación de torsión de la cámara auxiliar trasera.
Ventajas: estructura rentable, simple y compacta, pequeña carga de trabajo de mantenimiento, bajo costo de mantenimiento, protección contra sobrecarga del motor, cuando se accionan varios motores, la potencia del motor se puede equilibrar, el inicio retardado se puede dividir en estaciones y el impacto en la red eléctrica cuando se inicia la cinta transportadora se reduce, la confiabilidad es alta, el precio es bajo y es el modo de conducción preferido para cintas transportadoras con una longitud de menos de 1500 m.
Desventajas: El rendimiento del arranque suave es deficiente y no es adecuado para la cinta transportadora que se utilizará como cinta transportadora de transporte descendente y para la cinta transportadora que requiere la función de regulación de velocidad.
4. Motor tipo Y + acoplamiento de fluido regulador de velocidad + reductor
Un método de accionamiento comúnmente utilizado para cintas transportadoras grandes, que generalmente se utiliza en cintas transportadoras grandes de larga distancia con una longitud de más de 800 m.
Ventajas: la estructura es simple, la carga de trabajo de mantenimiento de sobrecarga es pequeña, el motor arranca sin carga, el motor está sobrecargado, cuando se accionan varios motores, se puede retrasar el arranque, reduce el impacto de la cinta transportadora en la red eléctrica cuando arranca, la confiabilidad es mayor, el rendimiento de arranque suave es mejor y tiene un rendimiento controlable de arranque, es decir, el tiempo de arranque es controlable, la curva de velocidad de arranque es controlable y el precio es bajo.
Desventajas: cuando se arranca el acoplamiento de fluido, debido a que el cambio de volumen de aceite y la curva de cambio de velocidad de la cavidad de trabajo del acoplamiento de fluido no son lineales y tienen retroceso, la respuesta dinámica controlable es lenta y es difícil realizar un control de circuito cerrado y, a veces, hay fugas de aceite. No es adecuado para cinta transportadora descendente y se requiere cinta transportadora con función de regulación de velocidad.

5. Motor tipo Y + dispositivo de accionamiento CST
El motor tipo Y + dispositivo de accionamiento CST está diseñado para cintas transportadoras por Dodge Company de los Estados Unidos, con alta confiabilidad del dispositivo de accionamiento mecatrónico, generalmente utilizado en cintas transportadoras de larga distancia con una longitud de más de 1000 m.
Ventajas: buen rendimiento de arranque suave, curva de velocidad lineal y controlable al arrancar, curva de velocidad controlable al estacionar, se puede realizar un control de circuito cerrado, arranque sin carga del motor, estructura simple, pequeña carga de trabajo de mantenimiento, cuando se accionan varios motores, se puede retrasar el arranque en etapas y reducir el impacto de la cinta transportadora en la red eléctrica al arrancar.
Desventajas: altos requisitos para los trabajadores de mantenimiento y aceite lubricante, alto precio del equipo. No es adecuado para cinta transportadora descendente y se requiere cinta transportadora con función de regulación de velocidad.
6. Motor de bobinado + reductor
Hay tres modos de control del motor de bobinado + reductor:
El primer tipo: resistencia de frecuencia de cadena de motor bobinado o resistencia al agua;
No hay función de regulación de velocidad y el motor no se puede arrancar con frecuencia; generalmente se usa en cintas transportadoras con una longitud de más de 500 my el motor no arranca con frecuencia.
El segundo tipo: resistencia metálica de cadena de motor bobinado;
No hay función de regulación de velocidad, pero el motor se puede arrancar con frecuencia y, después de frenar con potencia de tiristor, es un método de accionamiento común para cintas transportadoras descendentes.
El tercer tipo: regulación de velocidad en cascada del motor de bobinado.
Tiene la función de regulación de velocidad, se puede utilizar para control de circuito cerrado y generalmente se utiliza en cintas transportadoras grandes con una distancia larga de más de 1000 my una función de regulación de velocidad.
Ventajas: el primer y segundo método de control, estructura simple, pequeña carga de trabajo de mantenimiento, buen rendimiento de arranque suave, precio bajo, pequeño impacto en la red eléctrica al arrancar, alta confiabilidad, buen rendimiento controlable; El tercer modo de control tiene un excelente rendimiento de frenado.
Desventajas: el primer y segundo modo de control tienen un gran consumo de energía al arrancar y detener; El sistema del tercer modo de control es complejo y existe una tendencia a ser reemplazado por una frecuencia alterna o frecuencia alterna.
7. Motor CC de alta velocidad + reductor
Un modo de conducción con función de regulación de velocidad, que generalmente se utiliza en cintas transportadoras grandes que requieren una función de regulación de velocidad.
Ventajas: buen rendimiento de arranque suave, curva de velocidad lineal controlable durante el arranque, curva de velocidad lineal controlable al estacionar, buen rendimiento de frenado eléctrico, cambio de velocidad continuo, excelente rendimiento controlable, puede realizar control de circuito cerrado, alta confiabilidad.
Desventajas: el precio es muy caro, el sistema rectificador de tiristores es complejo, el equipo de control electrónico cubre un área grande, el factor de potencia es bajo, el motor de CC tiene anillos colectores, el desgaste de las escobillas es grande, la carga de trabajo de mantenimiento es grande, actualmente no existe un tipo a prueba de explosiones y no se puede utilizar en minas de carbón.

8. El motor CC de baja velocidad impulsa directamente el rodillo impulsor de la cinta transportadora.
Un modo de conducción con función de regulación de velocidad se utiliza generalmente en una cinta transportadora grande que requiere una función de regulación de velocidad y una cinta transportadora con una potencia de motor único superior a 1000 kw.
Ventajas: excelente rendimiento de arranque suave, curva de velocidad lineal controlable al arrancar, curva de velocidad lineal controlable al estacionar, buen rendimiento de frenado eléctrico, cambio de velocidad continuo, excelente rendimiento controlable, control de circuito cerrado, sin reductor, alta confiabilidad.
Desventajas: el precio es muy caro, el sistema rectificador de tiristores es complejo, el equipo de control electrónico cubre un área grande, el factor de potencia es bajo, el motor de CC tiene anillos colectores, el desgaste de las escobillas es grande, la carga de trabajo de mantenimiento es grande y el tipo actual de alta potencia no a prueba de explosiones no se puede utilizar en la mina de carbón.
9. Motor regulador de velocidad de conversión de frecuencia + reductor
Hay dos métodos de control para el motor de velocidad de conversión de frecuencia + reductor:
El primer tipo: conversión de frecuencia de intersección y alternancia.
El factor de potencia del sistema de conversión de frecuencia alterna es bajo y se generará una gran cantidad de armónicos de alto orden durante el arranque y la operación, lo que provocará contaminación en la red eléctrica. El arranque frecuente del motor también provocará un gran impacto de potencia reactiva en la red eléctrica, que debe gestionarse de forma integral. La inversión en equipos de conversión de frecuencia es relativamente baja.
El segundo tipo: el intercambio ha sido una conversión de frecuencia alterna.
Debido al hecho de que el sistema de conversión de frecuencia alterna está equipado con una unidad de filtro y una unidad de compensación en el dispositivo, el factor de potencia es superior a 0,9, el componente armónico más alto es muy pequeño y no causará contaminación armónica, y no hay necesidad de configurar un dispositivo de absorción de armónicos y compensación de potencia reactiva, pero la potencia única es superior a 2000 kw. El sistema de conversión de frecuencia alterna no se puede producir en China en la actualidad, y los equipos y repuestos deben importarse, lo cual es relativamente alto en el primero. inversión. Generalmente se utiliza en cintas transportadoras grandes que requieren funciones de regulación de velocidad.
Ventajas: excelente rendimiento de arranque suave, curva de velocidad lineal controlable al arrancar, curva de velocidad lineal controlable al estacionar, buen rendimiento de frenado eléctrico, cambio de velocidad continuo, excelente rendimiento controlable, control de circuito cerrado, alta confiabilidad.
Desventajas: el precio es muy caro, el equipo de control electrónico cubre un área grande, la potencia única actual es superior a 400 kW y no es a prueba de explosiones, no se puede utilizar en minas de carbón.
A través del análisis anterior de las ventajas y desventajas de varios modos de conducción de la cinta transportadora, al seleccionar el dispositivo de transmisión de la cinta transportadora:
Para las cintas transportadoras que no necesitan regulación de velocidad y la longitud de la cinta transportadora es inferior a 1500 m, el modo de conducción preferido es el motor tipo Y + acoplamiento de fluido limitador de par + reductor, seguido del motor de bobinado + reductor (el modo de control es la resistencia metálica de la cadena del motor de bobinado);
Si la longitud de la cinta transportadora es superior a 1500 m, el motor tipo Y + dispositivo de accionamiento CST es el método de accionamiento preferido, seguido por el motor tipo Y + acoplamiento de fluido regulador de velocidad + reductor.
En el caso de que el volumen de tráfico de la cinta transportadora cambie mucho y se requiera regulación de velocidad, el motor de regulación de velocidad de conversión de frecuencia + reductor es su método de accionamiento preferido, seguido de la regulación de velocidad en cascada + reductor del motor de bobinado.












